by Andrea Gray
This past summer I was privileged to work as an undergraduate on a National Science Foundation funded research project at Wright State University. This research program was focused on autonomous vehicles and split up the 11 participants into 4 separate teams working on specific research and development projects under the general topic of autonomous vehicles.
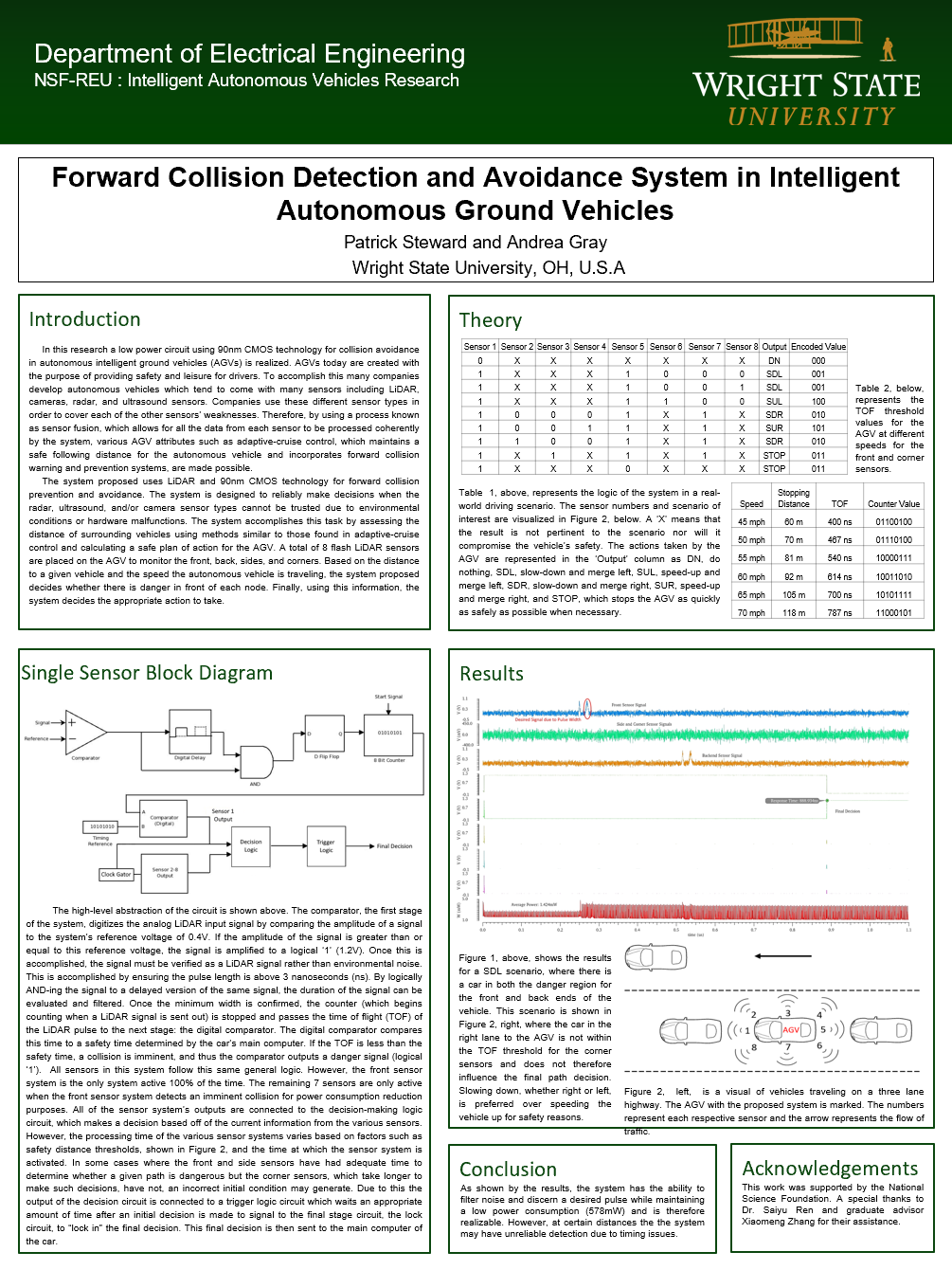
I was on a team with another undergraduate student studying Electrical Engineering working on developing a forward collision detection and avoidance system in autonomous ground vehicles using LiDAR and IBM’s 90nm CMOS technology. As a Software Engineering student, the focus of circuit creation and design was not something I was familiar with, but luckily, I had a wonderful teammate and supervisor, along with the experiences I have had at Embry-Riddle, I was able to learn and be successful in my work.
LiDAR is growing in popularity with autonomous ground vehicles due to their ability to function in adverse weather conditions (comparative to a camera) and their recent decrease in cost. The 90nm CMOS, Complimentary Metal-Oxide Semiconductor, is being used along with the LiDAR because it is a low-power and low-space solution that can also produce the necessary performance needed to make rapid decisions for the system. This LiDAR system, being low-energy and high-performance, is a development that is highly valued in the autonomous ground vehicle field. While there are many teams performing research and development for systems such as this one, there is no system that has been adopted by commercial or professional companies as there is still a lot to be perfected in the systems and costs can still be too high. This is where our research shows its value, since LiDAR is rapidly dropping in price and our system is based on dependability, our final design and report should be very useful for others in the field after presented at a technical conference at the end of this year.
For the development of this system, we first designed the basic circuitry logic in MATLAB. This process was where I was able to take the lead from my previous MATLAB and Simulink experience and develop a basic functional forward collision detection and prevention system. From there, we exported the circuit into a software platform called Cadence. Cadence allows for circuit development that meets the specific specifications and functionalities of particular technologies per their manufacturer’s specifications. My teammate, being familiar with Cadence, took over the circuitry design while I did more research on issues that would need to be mitigated with LiDAR systems such as the detection of the return LiDAR pulse off of obstacles with poor reflectivity rates (i.e. matte black bar bumpers). My teammate navigated the complex Cadence design process, with my research inputs, and we were able to successfully create our final circuitry system for a forward collision detection and prevention system for an autonomous ground vehicle.
By the end of the 3 months, I had gained a large understanding of autonomous ground vehicles, their history, and their future. I produced a background report, multiple progress reports on the technology we designed with their setbacks and future plans, and I am currently working on the final report of the project, along with my teammate, which is planned to be published into a conference by the end of the year. Along with knowledge gained on the topic, I learned an immense amount about perfecting my time management skills, my teamwork abilities, and, a vital skill for engineers, the ability to create a professional technical report that is well-organized and well-written all while being completed under a strict time constraint. I am very grateful for not only this experience, but also for the knowledge gained during it and the knowledge I was able to utilize from my academic career at Embry-Riddle.